Bir madenin yer altı galerisinde, bir uydu sinyalinin ulaşmadığı tünelde ya da çelik strüktürün gökyüzünü kapattığı bir tersanenin içinde, taşınan bir tarayıcının nerede olduğunu santimetre seviyesinde bilmek mümkün mü? Yakın zamana kadar sorunun cevabı, sabit referans noktaları kurmak ve her tarama oturumunu manuel olarak hizalamak gibi yavaş, hataya açık yöntemlerden geçiyordu. Üretim, savunma, inşaat ve madencilik sahalarının dijital ikizlerini hızla çıkarma ihtiyacı arttıkça GPS’in yetersiz kaldığı koşullarda çalışan, kendi konumunu kendi kendine türetebilen sistemlere duyulan ihtiyaç da büyüdü.
SLAM, yani Simultaneous Localization and Mapping, tam olarak söz konusu boşluğu doldurmak için geliştirilmiş bir matematiksel ve algoritmik çerçevedir. Türkçesiyle Eş Zamanlı Konumlandırma ve Haritalama, bir cihazın hareket ederken çevresini haritalamasını ve aynı anda harita içindeki kendi konumunu tahmin etmesini mümkün kılar. Robotik biliminin onlarca yıllık akademik birikiminden doğan SLAM, son on yılda otonom araçlardan elde taşınan endüstriyel 3D tarayıcılara, drone’lardan dört ayaklı saha robotlarına kadar geniş bir donanım yelpazesinin kalbine yerleşti.
Yazımızda SLAM’in matematiksel mantığını, hangi sensörlerle çalıştığını, GPS’siz ortamlarda santimetre düzeyinde doğruluğu nasıl koruduğunu ve endüstriyel mobil haritalama uygulamalarında neden vazgeçilmez hâle geldiğini sahadan örneklerle ele alacağız. Hedef, mühendislik ekiplerinin teknolojiyi yatırım kararına dönüştürürken ihtiyaç duyacağı kavramsal netliği sunmak.
SLAM Teknolojisinin Temel Mantığı
SLAM, ne salt bir konumlandırma yöntemi ne de tek başına bir haritalama tekniğidir. İki problemi birbirine bağlayarak çözer: bir taraftan cihazın çevresinin geometrik bir modelini kurarken, aynı anda kurulan harita içinde cihazın konumunu ve yönelimini takip eder. Tavuk-yumurta ilişkisini andıran kapalı bir döngü oluşur; harita oluşturmak için konum bilgisi gerekir, doğru konum hesaplamak için de güvenilir bir haritaya ihtiyaç vardır.
Çözüm, problemi olasılıksal bir durum tahmini olarak yeniden formüle etmekten geçer. Her ölçümün belirli bir hata payı taşıdığı kabul edilir; cihazın olası konumu ve haritadaki noktaların pozisyonu, gözlem geldikçe sürekli güncellenen olasılık dağılımları olarak modellenir. Hareket ilerledikçe sistem yeni veriyi önceki tahminlerle birleştirir, tutarsızlıkları azaltır ve giderek daha tutarlı bir dünya modeline yakınsar.
Otonom robotlar için SLAM kritik bir yetenektir çünkü gerçek dünyadaki çoğu uygulama, önceden hazırlanmış bir haritanın bulunmadığı ya da haritanın güncel olmadığı koşullarda çalışmayı gerektirir. Bir madende açılan yeni bir galeri, yapım aşamasındaki bir bina, deprem sonrası değişmiş bir saha, hatta yangınla zarar görmüş bir endüstriyel tesis; sayılan tüm senaryolar, cihazın kendisinin keşif sırasında haritayı oluşturmasını şart koşar.
SLAM’in Çalışma Prensibi: Algılama, Konum Tahmini ve Harita Genişletme
SLAM iş akışını dört ardışık ana aşamada incelemek mümkündür. Süreç, cihazın çevreden veri toplamasıyla başlar. Lazer tabanlı sistemlerde her saniye yüz binlerce hatta milyonlarca lazer darbesi gönderilir; her darbenin geri dönüş süresi, çarptığı yüzeye olan mesafeyi verir. Görsel sistemlerde ise birden fazla kameradan gelen görüntü kareleri arasında öznitelik eşleme yapılır; köşe noktaları, kenarlar ve doku desenleri kareler arasında izlenerek derinlik ve hareket çıkarılır.
Frame Matching: Yeni Tarama Eski Haritaya Nasıl Yerleşir?
Toplanan her yeni veri çerçevesi, biraz önce kurulan harita parçasıyla eşleştirilir. Lazer tabanlı yaklaşımda yaygın yöntem, ardışık iki nokta bulutu arasındaki en iyi rotasyon ve öteleme kombinasyonunu bulmaktır. Bunun için Iterative Closest Point gibi geometrik kayıt algoritmaları, yeni çerçeveyi mevcut haritaya iteratif olarak yaklaştırır. Görsel SLAM tarafında ise öznitelik eşleşmeleri üzerinden çoklu görüş geometrisi kurulur ve kameranın yeni pozu hesaplanır.
Pose Estimation: Cihazın Kendi Yerini Bilmesi
Frame matching sonucu elde edilen göreceli hareket bilgisi, cihazın bir önceki konumuna eklenerek yeni mutlak konum tahmin edilir. Sadece eşleştirmeye güvenmek hata birikimine yol açacağı için sistem genellikle inertial measurement unit verisini de işin içine katar. IMU, ivme ve açısal hız ölçer; yüksek frekanslı çıktısı, lazer ya da görüntü tabanlı yavaş ölçümler arasındaki kısa süreli hareketi kapatır. Sensör füzyonu sayesinde cihaz hızlı ve ani manevralarda bile konum kestirimini kaybetmez.
Map Expansion: Haritanın Sürekli Büyümesi
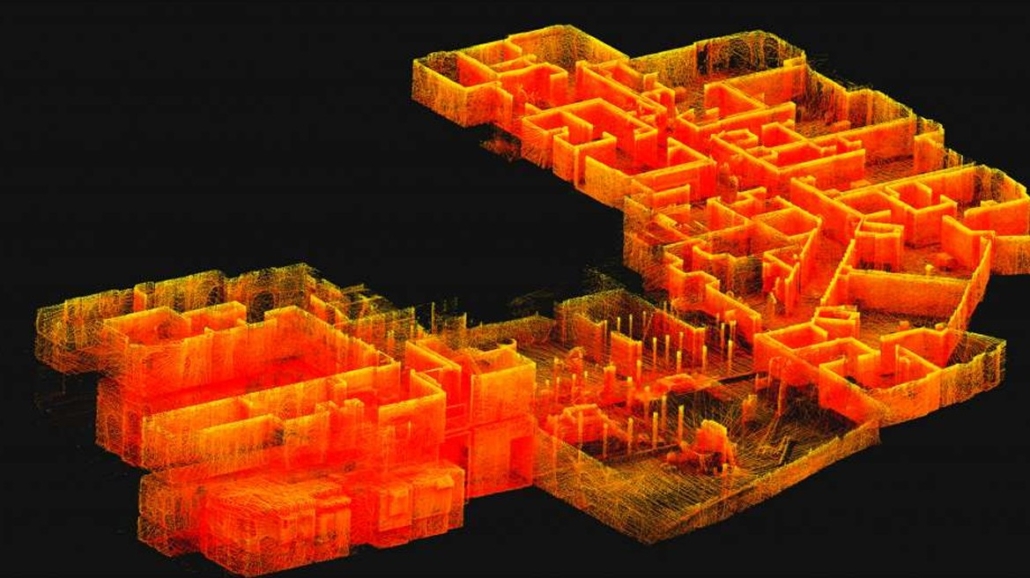
Cihaz pozunu güncelledikten sonra elindeki yeni nokta bulutu çerçevesi global koordinatlara yerleştirilir ve mevcut haritaya eklenir. Harita böylece dinamik olarak büyür; her adım, gelecekteki frame matching işlemleri için daha zengin bir referans sağlar. Dış mekânda yapılan bir tarama oturumu boyunca harita, milyonlarca noktaya ulaşan büyük ölçekli bir nokta bulutuna dönüşür.
Loop Closure: Birikmiş Hatanın Düzeltilmesi
Cihaz uzun mesafeler kat ettikçe küçük ölçüm hataları toplanır ve harita giderek bükülür; düz yürüdüğünüz koridor, harita üzerinde hafif bir yay çizmeye başlayabilir. Loop closure, sistemin daha önce ziyaret edilmiş bir noktayı tanıması ve geri dönüşle birlikte birikmiş hatayı geriye doğru düzelterek harita topolojisini bütünsel biçimde optimize etmesi anlamına gelir. Modern SLAM çerçevelerinde graph-based optimizasyon teknikleri, tüm gözlemleri ortak bir maliyet fonksiyonu üzerinde minimize ederek düzeltmeyi gerçekleştirir.
Uzman Notu: Loop closure başarısı, sahanın kendi kendine ne kadar benzediğine doğrudan bağlıdır. Tekdüze koridorlar, geniş açık tarlalar ya da geometrisi tekrar eden depo rafları, sistemin daha önce gördüğü bir yeri tanımasını zorlaştırır. Bu tür ortamlarda yapılacak tarama planlamasında belirli aralıklarla tanınabilir referans noktalarına geri dönülmesi, sonuç haritasının doğruluğunu kayda değer ölçüde artırır. Uzun lineer tüneller için RTK destekli backpack modu, bu zaafiyeti önemli ölçüde dengeleyebilir.
SLAM’in Sensör Mimarisi: LiDAR, Kamera ve IMU Üçgeni
Bir SLAM sisteminin doğruluğu ve dayanıklılığı, donanımının seçimine doğrudan bağlıdır. Üç temel sensör kategorisi öne çıkar ve çoğu modern endüstriyel sistem, üçünü farklı oranlarda füzyonla kullanır.
LiDAR Sensörler
Light Detection and Ranging cihazları, lazer darbeleri yayar ve yansıma süresini ölçerek noktaların konumunu üç boyutlu uzayda doğrudan elde eder. Çıktı, gerçek geometrik ölçeğe sahip yoğun bir nokta bulutudur. LiDAR, ortam ışığından bağımsızdır; karanlıkta da, parlak güneş altında da çalışır. 360 derecelik dönen ya da katı hâl yapıda gelen modern LiDAR sensörleri, saniyede iki milyona yaklaşan nokta tarama hızlarına ulaşabilmektedir. Endüstriyel mobil haritalama için tercih edilen baskın sensör türü hâlâ LiDAR’dır.
Görsel Sensörler ve RGB-D Kameralar
Tek kamera, stereo çift ya da derinlik kamerası kullanan görsel SLAM, çevreden zengin renk ve doku bilgisi yakalar. Anlamsal anlama, nesne tanıma ve sahnenin yorumlanması açısından LiDAR’a kıyasla güçlüdür. Düşük maliyetli olması mobil tüketici uygulamalarında yaygınlaşmasını sağladı. Buna karşılık görsel SLAM, ışık koşullarına ve dokusuz yüzeylere karşı kırılgandır; tamamen karanlık bir tünelde ya da bembeyaz bir duvar boyunca tek başına yetersiz kalabilir.
Inertial Measurement Unit (IMU)
İvmeölçer, jiroskop ve manyetometre içeren IMU, cihazın anlık hareketini yüksek frekansta ölçer. Yalnız başına kullanıldığında integrasyon hatası nedeniyle hızla kayar; ancak LiDAR ya da kamera ile birlikte kullanıldığında iki ana ölçüm arasındaki boşlukları doldurur, hızlı hareketlerde sistemin pozisyon tahminini stabilize eder. Üst düzey mobil haritalama sistemlerinin neredeyse tamamı, çıktının dengesi açısından IMU füzyonuna bağımlıdır.
Çok Sensörlü Füzyon: Tightly-Coupled ve Loosely-Coupled Yaklaşımlar
Sensör füzyonu mimarileri iki ana grupta toplanır. Loosely-coupled yaklaşımda her sensörün çıktısı bağımsız olarak işlenir ve sonuçlar üst seviyede birleştirilir; uygulaması basittir ancak ölçümler arasındaki ince çapraz korelasyon kaybedilir. Tightly-coupled mimaride ham veriler ortak bir tahmin filtresinde, çoğunlukla bir Extended Kalman Filter ya da iteratif hata-durumlu Kalman filtresi içinde, eş zamanlı olarak optimize edilir. Hesaplama maliyeti yüksek olsa da doğruluk ve dayanıklılık açısından net üstünlük sağlar.
SLAM Türleri: LiDAR, Visual ve Hibrit Yaklaşımlar
SLAM tek bir algoritmadan ibaret değildir; uygulamaya, sensör konfigürasyonuna ve çalışma ortamına göre farklılaşan geniş bir aileyi temsil eder. Endüstriyel mobil haritalamada sıkça karşılaşılan başlıca varyasyonlar şunlardır.
2D LiDAR SLAM
Tek hatlı LiDAR ile yatay düzlemde haritalama yapar. Otonom temizlik robotları, depo navigasyonu ve düz zemin uygulamalarında yaygındır. Yükseklik bilgisi taşımadığı için karmaşık üç boyutlu sahaların dokümantasyonuna uygun değildir; ancak hesaplama yükü düşük olduğu için gömülü sistemlerde tercih edilir.
3D LiDAR SLAM
Çok hatlı LiDAR ya da katı hâl 3D LiDAR sensörleriyle çalışır. Çıktısı, gerçek dünya geometrisini bütünüyle temsil eden üç boyutlu nokta bulutudur. Madencilik, tünel haritalama, tesis dijital ikizi ve as-built dokümantasyonu gibi mühendislik kararına temel oluşturan uygulamalar için endüstri standardı kabul edilir.
Visual SLAM (vSLAM)
Bir veya birden fazla kameradan gelen görüntülerle çalışır. Düşük maliyet ve renk bilgisi açısından avantajlı, fakat ışık koşullarına bağımlı bir yaklaşımdır. Mobil cihazlarda artırılmış gerçeklik uygulamalarının çoğu, vSLAM çekirdeği üzerine kurulur.
LiDAR-Inertial-Visual SLAM
Üç sensör türünün füzyonuyla çalışan en yetkin sınıftır. Hem geometrik doğruluk, hem renk bilgisi, hem de hızlı hareket dayanıklılığı sunar. Otonom kara araçları, gelişmiş drone tabanlı haritalama ve yüksek hızlı endüstriyel mobil tarama sistemleri ilgili mimariye doğru evriliyor.
Algoritmik Yaklaşımlar: Filter-Based ve Graph-Based
SLAM literatüründe iki büyük matematiksel okul bulunur. Filter-based yöntemler, olasılıksal duruma Bayes filtresi mantığıyla yaklaşır; Extended Kalman Filter ve onun varyantları en bilinen örneklerdir. Hızlı çalışırlar ancak büyük ölçekli loop closure problemlerinde sınırlıdırlar. Graph-based yöntemler ise tüm gözlemleri bir faktör grafı olarak modeller ve global olarak optimize eder. Hesaplama maliyeti yüksektir, fakat geniş ölçekli, çok döngülü saha haritalamalarında çok daha tutarlı sonuçlar verir.
SLAM tabanlı mobil haritalamanın saha uygulamalarında nasıl bir verimlilik kazandırdığını kendi süreçlerinizde değerlendirmek isterseniz, Artec Jet ve diğer 3D tarama çözümleri için infoTRON uzman ekibiyle iletişime geçebilirsiniz.
GPS’siz Ortamlarda Konumlandırma Nasıl Mümkün Oluyor?
Modern saha çalışmalarının en kritik açıklarından biri, GPS sinyalinin ulaşamadığı kapalı, gömülü ya da elektromanyetik girişim altındaki ortamlardır. Yer altı madenleri, çok katlı bina iç hacimleri, tüneller, hangarlar ve metalik strüktürle çevrili tesisler bunların başında gelir. Geleneksel topografik ölçüm metotları söz konusu ortamlarda total station ile sabit nokta zinciri kurmayı gerektirir; yavaş, iş gücü yoğun ve hata kaynaklı bir süreçtir.
SLAM söz konusu sınırlamayı, dış konum referansına ihtiyaç duymayan içsel bir konumlandırma stratejisi sunarak aşar. Cihaz hareket ederken çevredeki sabit geometrik öznitelikleri referans olarak kullanır; köşeler, duvarlar, kolonlar, boru hatları, donanım kabinleri gibi sabit özellikler, harita inşa edildikçe doğal birer landmark hâline gelir. Cihaz konumunu uydudan değil, kendi inşa ettiği geometrik kontekstten türetir.
GPS reddedilmiş ortamlarda doğruluğu artırmak için kullanılan en güçlü stratejilerden biri, hibrit konumlandırmadır. Açık alanda GNSS RTK düzeltmeleriyle santimetrik doğrulukta georeferanslama yapılırken, sinyalin kaybolduğu ana SLAM devreye girer ve oturumda kesinti olmadan iç hacme geçilir. Aynı tarama dosyası, hem kapalı hem açık alan verisini tutarlı bir koordinat sisteminde tutar. Artec Jet’in backpack modu, hibrit yaklaşımı temel kullanım senaryosu olarak destekler ve geçişi operatör müdahalesi olmadan gerçekleştirir.
Loop closure mekanizması, GPS’siz uzun mesafeli çalışmalarda sürüklenmeyi kontrol altına almanın diğer kilit unsurudur. Operatör, taradığı sahanın belirli noktalarına farklı zamanlarda geri döndüğünde sistem ilgili noktaları tanır ve birikmiş hatayı geriye doğru düzelterek harita bütünlüğünü korur. Yer kontrol noktalarının kullanımı ise mutlak doğruluğu jeodezik referans çerçevesine bağlamak için yardımcı bir katmandır.
Endüstriyel SLAM Uygulamaları: Sahadan Üretime
SLAM teknolojisinin yayılma hızı, sunduğu pratik faydanın kanıtıdır. Saatlerce süren manuel ölçümleri dakikalara indirmesi, GPS’in ulaşamadığı yerleri haritalanabilir kılması ve hareket halindeyken veri toplamaya izin vermesi, birden fazla sektörde iş akışlarını yeniden tanımlamıştır.
Madencilik ve Yer Altı Altyapı
Yer altı galerilerinde periyodik hacim ölçümü, yakınsama izleme ve kazı ilerleme dokümantasyonu, geleneksel yöntemlerle hem yavaş hem güvenlik açısından risklidir. SLAM tabanlı mobil tarayıcılar, operatörün kazı cephesine girmesine gerek kalmadan kafes ya da robot platform montajıyla galeriyi haritalayabilir. Üretilen nokta bulutu, hacim hesabı, duvar hareketi izleme ve cevher çıkış planlaması için doğrudan kullanılabilir.
İnşaat ve BIM Süreçleri
Mevcut durum dokümantasyonu, BIM modeline geri besleme, çakışma tespiti ve ilerleme takibi için inşaat sahaları yoğun şekilde mobil 3D tarama kullanmaya başladı. Bir kat hacminin tek bir taşımayla on dakikadan kısa sürede taranması, klasik total station ile günlerce süren bir işi katlanarak hızlandırır. Üretilen veri, scan-to-BIM iş akışlarına LAS, LAZ veya E57 formatlarında doğrudan beslenir.
Savunma ve Kamu Güvenliği
Hızlı saha keşfi, olay yeri rekonstrüksiyonu, taktik tesis haritalama ve kritik altyapı dokümantasyonu uygulamalarında saniyeler kazanmak operasyonel başarıyı doğrudan etkiler. SLAM tabanlı drone montajı, operatörü tehlikeden uzak tutarken sahayı tam karanlıkta dahi haritalayabilir. Söz konusu ihtiyaç doğrultusunda hizmet veren sektörler hakkında detaylı bilgi için savunma ve havacılık çözümleri sayfamız kapsamlı bir referans sunar.
Endüstriyel Tesis Dijital İkizi
Üretim hatlarının yeniden yapılandırılması, yeni ekipman yerleşim planlaması ve revamp projeleri için tesisin güncel ve doğru bir 3D modeli olmazsa olmazdır. SLAM tabanlı mobil haritalama, milyonlarca metre küplük bir tesisi günler yerine saatlerde dijital ortama aktarır. Çıktı, mühendislik ekiplerinin tasarım kararlarını ölçeklendirilebilir bir veriyle desteklemesini sağlar.
Tersine Mühendislik ve Büyük Parça Tarama
Büyük endüstriyel parçaların, kalıpların ve tesis bileşenlerinin tersine mühendislik için 3D taranması, klasik portatif tarayıcılarla saatler alabilir. Mobil SLAM yaklaşımı, geniş ölçekli geometrileri hızla yakalarken hassas detaylar için handheld tarayıcılarla birleştirilir. Süreçlere ilişkin tersine mühendislik hizmetlerimiz, farklı ölçek ve hassasiyet ihtiyaçlarını uçtan uca karşılayacak biçimde planlanır.
Kalite Kontrol ve Metroloji
SLAM tabanlı geniş alan haritalama, hassas metroloji uygulamalarının yerini almaz; tamamlar. Yapı doğrulaması, deformasyon analizi ve uzun dönemli izleme gibi senaryolarda mobil tarayıcılarla elde edilen veri, ZEISS Hands On Metrology çözümleri gibi yüksek hassasiyetli sistemlerle elde edilen detay verilerle çakıştırılarak çok katmanlı bir kalite verisi üretilir.
Teknik Not: Mobil SLAM çıktıları, geleneksel terrestrial laser scanning ile karşılaştırıldığında genelde 5-10 milimetre düzeyinde global doğruluk sunar. Çoğu mühendislik uygulaması için yeterli olan bu seviye, metrology-grade kontrollü ölçüm bekleyen üretim parçaları için doğrudan referans alınmamalıdır. Doğru iş akışı, mobil tarayıcıyla çıkarılan global haritayı ana referans çerçevesi olarak kullanmak ve kritik bileşenleri bu çerçevenin içine yerleştirilen yüksek hassasiyetli handheld tarayıcı verisiyle desteklemektir. İki veri katmanının ortak koordinat sisteminde birleştirilmesi, hem hızı hem doğruluğu maksimize eder.
SLAM Tabanlı Mobil 3D Haritalamanın Zorlukları ve Sınırları
Teknolojinin sunduğu hız ve esneklik tartışılmaz olmakla birlikte, sahada başarılı bir SLAM uygulaması ancak sistemin sınırlarını tanımakla mümkündür. Yaygın olarak karşılaşılan zorluklar, doğru planlama ile önemli ölçüde aşılabilir.
Geometrik Tekdüzelik
Uzun düz koridorlar, geniş açık alanlar, kumlu plajlar ya da tarlalar gibi geometrik öznitelik kıtlığı çeken ortamlar, frame matching algoritmalarını zorlar. Sistem, bir önceki çerçeveyi yeni çerçeveye bağlayacak yeterli ortak referans bulamadığında pozisyon tahmininde sürüklenme yaşar. Söz konusu durumda visual SLAM ile lazer SLAM’in birlikte kullanıldığı çok kanallı füzyon mimarileri, dokulu yüzeylerden gelen görsel öznitelikleri devreye sokarak çözüm üretir.
Dinamik Nesneler
Hareket eden insanlar, vinçler, araçlar ve geçici ekipmanlar harita içinde geçici gürültü oluşturur. Modern SLAM motorları, hareketli noktaları sabit referanslardan ayırt etmek için geliştirilmiş filtreleme mekanizmaları kullanır. Yine de yoğun hareketin olduğu bir ortamda, tarama planlamasının dinamik unsurları minimize edecek zaman dilimlerinde yapılması veri kalitesini artırır.
Hesaplama Yükü ve Veri Boyutu
Yüksek tarama hızlı LiDAR sensörleri, saniyede ürettikleri milyonlarca nokta ile büyük veri setleri oluşturur. Tek bir saatlik bir oturum onlarca gigabayta ulaşabilir. Söz konusu veriyi işleyecek altyapının önceden planlanması, projenin teslim takvimini doğrudan etkiler. Bulut tabanlı işleme platformları ya da yüksek RAM ve grafik işlemcili iş istasyonları, modern mobil tarama iş akışının ayrılmaz parçasıdır.
Çevresel Koşullar
Yağmur, sis ve toz gibi atmosferik koşullar, lazer darbelerinin geri dönüşünü etkileyerek nokta bulutunda gürültü oluşturur. Endüstriyel sahalarda IP65 ve üzeri koruma sınıfına sahip cihazlar tercih edilmelidir. Geniş sıcaklık aralığında çalışabilen donanımlar, kış koşullarında dış mekân çalışmalarını ya da sıcak proses ortamlarını mümkün kılar.
Sıkça Sorulan Sorular
SLAM ile GPS arasındaki temel fark nedir?
GPS, açık gökyüzü altında uydu sinyallerine dayalı mutlak konum bilgisi sağlar; iç mekânlarda, yer altında ya da metalik strüktürle çevrili alanlarda çalışmaz. SLAM ise dış referansa ihtiyaç duymadan, çevredeki geometrik özniteliklerden konum türetir. Modern endüstriyel sistemlerde iki teknoloji birbirinin alternatifi değil, tamamlayıcısıdır; açık alanda GNSS RTK ile mutlak doğruluk sağlanırken, sinyalin kaybolduğu noktada SLAM devreye girerek tarama oturumunun sürekliliğini korur.
LiDAR SLAM ile Visual SLAM arasında hangisi daha doğrudur?
Doğruluk açısından LiDAR SLAM, geometrik gerçekliği doğrudan ölçtüğü için endüstriyel uygulamalarda tutarlı biçimde önde gelir. Visual SLAM, anlamsal anlama ve renk bilgisi açısından güçlü olsa da ışık koşullarına bağımlıdır. Mühendislik kararı isteyen mobil haritalama için LiDAR çekirdekli, görsel ve IMU sensörleriyle desteklenmiş hibrit sistemler en yetkin yaklaşımdır.
SLAM tabanlı bir tarayıcı hangi doğrulukta veri üretir?
Endüstriyel sınıf mobil SLAM sistemleri, geniş ölçekli sahalarda 5-10 milimetre düzeyinde global doğruluk sunar. Söz konusu seviye, dijital ikiz oluşturma, BIM doğrulaması, hacim hesabı ve as-built dokümantasyon gibi mühendislik uygulamalarının çoğunluğu için yeterlidir. Üretim parçası kalite kontrolü gibi mikrometre düzeyinde hassasiyet beklenen senaryolar için ise yüksek çözünürlüklü handheld ya da terrestrial sistemlerle birlikte çalışılması gerekir.
SLAM ile dijital ikiz oluşturma süreci ne kadar sürer?
Sahanın boyutuna ve karmaşıklığına bağlı olarak, klasik metotlarla günler hatta haftalar süren bir saha taraması mobil SLAM ile saatlere indirilebilir. Birkaç bin metrekarelik bir tesis, tek bir operatörle bir iş günü içinde taranıp ham nokta bulutu olarak teslim edilebilir. İşleme, georeferanslama ve birleştirme aşamaları, kullanılan yazılım altyapısına göre ek olarak birkaç saatten birkaç güne uzanır.
Hangi sektörler SLAM tabanlı haritalamadan en çok fayda sağlar?
Madencilik, inşaat ve BIM, savunma ve kamu güvenliği, enerji ve petrokimya tesisleri, lojistik depoları, ulaşım altyapısı, kültürel miras dokümantasyonu ve dijital ikiz odaklı her sektör temel kullanıcılardandır. Ortak payda; geniş, karmaşık ya da GPS’siz alanların hızla ve doğru biçimde dijitalleştirilmesini gerektiren işlerdir.
Mobil SLAM tarayıcı satın alırken nelere dikkat edilmelidir?
Donanım seçiminde tarama menzili, doğruluk seviyesi, IP koruma sınıfı, ağırlık, batarya ve depolama kapasitesi temel kriterlerdir. Bunların yanı sıra cihazın hangi taşıma modlarını desteklediği, yazılım iş akışının veri çıkış formatları, iş istasyonu gereksinimleri ve saha sonrası destek hizmetlerinin kapsamı kararı doğrudan etkiler. Cihazı sahada çalıştıracak ekibin eğitim alabileceği ve uygulama mühendisliği desteği bulabileceği bir partner seçmek, yatırımın geri dönüş süresini belirgin şekilde kısaltır.
SLAM ve Endüstriyel Dijitalleşmenin Yeni Standardı
SLAM teknolojisi, robotik araştırmalarının laboratuvar sınırlarından çıkarak mühendislik sahasının pratik araç kutusunda kalıcı bir yer edindi. Manuel ölçümün haftalarca süreceği bir tesisi saatlerde dijitalleştirmek, GPS’in ulaşamadığı bir tüneli santimetre seviyesinde haritalamak ve elde edilen nokta bulutunu doğrudan BIM, dijital ikiz ya da CAD iş akışına beslemek bugün artık istisna değil, standart hâline geliyor.
Teknolojiyi anlamak yetmez; doğru sensör mimarisini seçmek, sahaya uygun taşıma modunu belirlemek, veri işleme altyapısını kurmak ve elde edilen sonucu mühendislik kararına dönüştürmek için saha tecrübesi gereklidir. Bir SLAM sisteminin teknik datasheet üzerinde sunduğu sayılarla, gerçek bir endüstriyel sahada elde ettiği sonuç arasındaki fark, çoğu zaman sistemi kuran ve süreci yöneten ekibin uygulama derinliğine bağlıdır.
Türkiye’de üretim ve mühendislik ekosisteminin dijital dönüşüm hızı, mobil 3D haritalama gibi olgunlaşmış teknolojilerin sahaya hızla yayılmasını mümkün kılıyor. Doğru partnerle kurulan iş akışı, tek seferlik bir tarama projesinin çok ötesine geçer ve kuruluşun veri odaklı karar mekanizmalarını uzun vadede besleyen sürdürülebilir bir kaynak yaratır.
infoTRON’un Bu Teknolojiye Yaklaşımı
infoTRON olarak 30+ yılı aşkın 3D teknoloji deneyimimizle, SLAM tabanlı mobil haritalama ve geniş ölçekli 3D tarama çözümlerini Türkiye’deki üretim, savunma, inşaat ve enerji sektörlerinin saha gerçeklikleriyle buluşturuyoruz. Artec 3D’nin altın seviye partneri olarak portföyümüzde sunduğumuz Artec Jet; SLAM tabanlı konumlandırma ile yapay zekâ destekli otonomiyi tek bir kompakt cihazda birleştiren yeni nesil yüksek hızlı mobil LiDAR haritalama sistemi olarak şantiyeleri, tesisleri ve altyapı projelerini survey-grade hassasiyetle dijital dünyaya aktarıyor.
Geniş ölçekli mobil haritalama ile mikron düzeyinde hassas tarama ihtiyaçlarını birlikte yöneten kuruluşlar için Artec Leo gibi handheld tarayıcılar ve Artec Ray II gibi uzun menzilli sistemlerle desteklenen entegre iş akışları sunuyoruz. Çözümlerimizi yalnızca cihaz teslimatı olarak değil; donanım seçimi, uygulama mühendisliği, operatör eğitimi, iş istasyonu kurulumu ve 7/24 teknik destek dahil uçtan uca bir hizmet modeli olarak konumlandırıyoruz.
Deneyimli uygulama mühendislerimiz, sahanızı keşfetmeden önce projenizin doğruluk, hız ve veri formatı gereksinimlerini birlikte tanımlıyor; canlı demo ile cihazı kendi ortamınızda görmenize, entegrasyon hizmetiyle de mevcut CAD, BIM ve PLM altyapınıza sorunsuz bağlanmasına olanak sağlıyoruz. Üretim verimliliğinizi, kalite güvencenizi ve rekabet gücünüzü artıracak bir SLAM çözümünün sahanıza nasıl yerleşeceğini birlikte planlamak için ekibimizle iletişime geçmenizi bekliyoruz.
SLAM tabanlı mobil 3D haritalamanın projelerinize nasıl entegre edileceğini, doğru sensör konfigürasyonunu ve iş akışı kurgusunu birlikte değerlendirmek için infoTRON uzman ekibiyle iletişime geçebilirsiniz.


